Biodegradable Material Extrusion Line About Biodegradable Material Extrusion Line, Juli extruder SHJ Twin Screw Extruder has good feeding characteristics, is suitable for powder processing, and has better mixing, exhaust, reaction and self-cleaning functions than Single Screw Extruder It is characterized by its superiority when processing plastics and blends with poor thermal stability. Extruded Acrylic Sheets,Recycled Plastic Extrusion,Plastic Extrusion Line,Plastic Sheet Extrusion Process Nanjing Juli Chemical Machinery Co., Ltd. , https://www.jlextruder.com


Positioning guidance 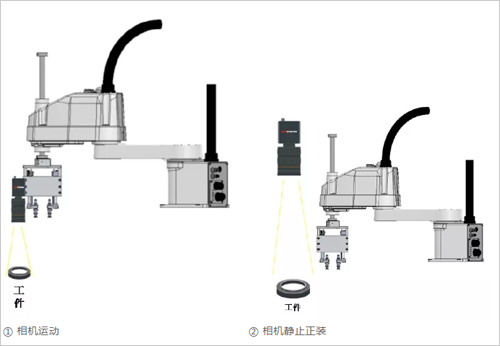
With the increasing demand for automation in industrial production, vision technology has been widely introduced into the industrial robot industry, and visual industrial robots can achieve positioning, gripping, and alignment assembly faster, more accurately, and more flexibly. The main function of vision technology based on image analysis in robot guidance related applications is to accurately acquire the coordinate position and angle of the object (object to be grasped) and the object (object to be assembled), and convert the image coordinates into identifiable by the robot. Robot coordinates, guiding the robot to correct and assemble. Therefore, hand-eye calibration and positioning guidance are the core of machine vision application in robot guidance.
Hand-eye calibration principle
Principle: The so-called hand-eye calibration, together with the coordinate system of the hand (manipulator) and the eye (camera), solves the coordinate conversion relationship between the camera and the robot, allowing the robot to accurately capture the target of the camera.
From one coordinate system XOY to another coordinate system X'O'Y', it can be seen that XOY is translated, rotated, and scaled equivalent to another coordinate system X'O'Y'.
The conversion relationship is as follows:
The above matrix accurately describes the relationship between two coordinate systems, where fx, fy are the scaling scales of the X and Y directions, respectively, a, b are the translational quantities of the X and Y directions, respectively, and θ is the rotation angle of the coordinate system. .
Hand eye calibration process
To solve the calibration conversion formula, only the corresponding points of three or more coordinate systems are needed. Therefore, in the visual application, the N-point calibration algorithm is generally used to realize the hand-eye calibration.
In applications where machine vision and robotics are combined, robotic guided positioning is most common. In such a scenario, it can be roughly divided into a single camera grab positioning guide, a single camera correcting guide, and a top and bottom camera fit positioning guide.
The above picture shows the scene of single camera positioning guidance. The camera can be mounted on the robot or fixed on the machine. The incoming material is photographed by the camera, and is positioned so that the robot can pick up the incoming material according to the positioning information, thereby reducing the accuracy requirement for the transfer mechanism between the stations and ensuring the consistency of the gripping position.